
 产品:8
产品:8
 联系我们
联系我们

声明:本媒体部分图片、文章来源于网络
版权归原作者所有,如有侵权,请与我联系删除。
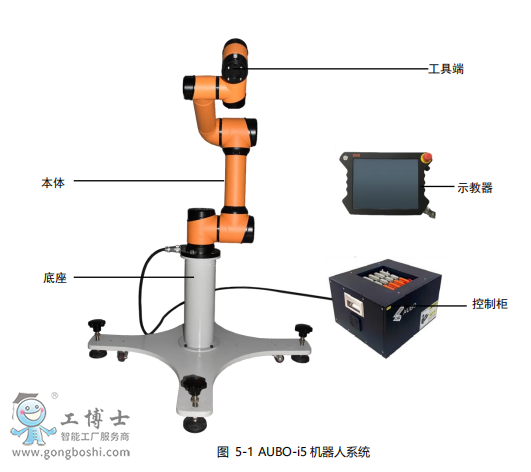
控制柜是 AUBO-i 系列机器人的控制主体,控制柜提供多个 IO 接口,通过 CAN 总线与机器人本体通信。
遨博机器人工具端上有 4 个数字输入输出接口及 2 个模拟输入接口。
示教器给用户提供了一个可视化的操作界面。用户可以通过示教器对机器人进行测试、编程和仿真,仅需少量的编程基础就可对机器人进行操作。
了解更多傲博机器人
- 下一篇:遨博首发防爆机器人亮相大连国际工业博览会
- 上一篇:遨博机器人特点